Note
Go to the end to download the full example code.
Half car example#
Half car example
All specified files deleted successfully.
All specified folders and their contents deleted successfully.
Deleted folder and its contents: /home/docs/checkouts/readthedocs.org/user_builds/pymycar/checkouts/stable/examples/VerticalModels/solutions
All specified folders and their contents deleted successfully.
from pymycar.files import prepare_simulation, append_results_to_file
from pymycar.Logger.library_versions import set_logger, log_library_versions, log_system_info, log_end_analysis#, log_model_information
from pymycar.Vehicle.car import MyCar
from pymycar.Vehicle.chassis import Chassis
from pymycar.Vehicle.suspension import Suspension, SimpleSuspension
from pymycar.Vehicle.wheel import Wheel
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from pymycar.VerticalModels.models import VerticalQuarterCar
from pymycar.VerticalModels.exitations import sin_negative_part_exitation,sin_exitation
import os
path = os.getcwd()
result_folder_name = "solutions"
prepare_simulation(path, result_folder_name)
logger = set_logger(result_folder_name)
log_system_info(logger) # log system imformation
log_library_versions(logger) # log Library versions
chassis_class = Chassis(front_axle_to_com = 0.8,
rear_axle_to_com = 0.8,
front_track=0.6,
rear_track=0.6,
com_height = 400,
mass=160,
inertia_x=100,
inertia_y=100,
inertia_z=1320,
drag_coefficient=0.34,
lift_coefficient=0.0)
left_front_wheel = Wheel(mass=10.0,
spin_inertia=1.3,
nominal_radius=100,
radial_stiffness=125560,
radial_damping=0.0,
nominal_vertical_load = 5000.0,
max_longitudinal_adherence=1.57,
max_lateral_adherence=1.41,
sidelsip_stiffness=25.0,
longitudinal_stiffness=34.0)
right_front_wheel = Wheel(mass=10.0,
spin_inertia=1.3,
nominal_radius=100,
radial_stiffness=125560,
radial_damping=0.0,
nominal_vertical_load = 5000.0,
max_longitudinal_adherence=1.57,
max_lateral_adherence=1.41,
sidelsip_stiffness=25.0,
longitudinal_stiffness=34.0)
left_front_suspension = SimpleSuspension(stiffness=35000,
damper=2800)
right_front_suspension = SimpleSuspension(stiffness=35000,
damper=2800)
mycar = MyCar(chassis=chassis_class,
left_rear_wheel=None,
right_rear_wheel=None,
left_front_wheel=left_front_wheel,
right_front_wheel=right_front_wheel,
left_rear_suspension=None,
right_rear_suspension=None,
left_front_suspension=left_front_suspension,
right_front_suspension=right_front_suspension)
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import pyvista as pv
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import pyvista as pv
from pymycar.VerticalModels.models import VerticalHalfCar
def from_data(target_time):
defined_time = np.linspace(0, 2, 100000)
amplitude = 0.03
frequency = 5.556/3
sin_value = amplitude*np.sin(2 * np.pi * frequency * defined_time)
aux = -np.maximum(sin_value, 0)
defined_sol = np.interp(target_time, defined_time, aux)
return 125560 * defined_sol #np.array([0.0, 125560 * defined_sol ])
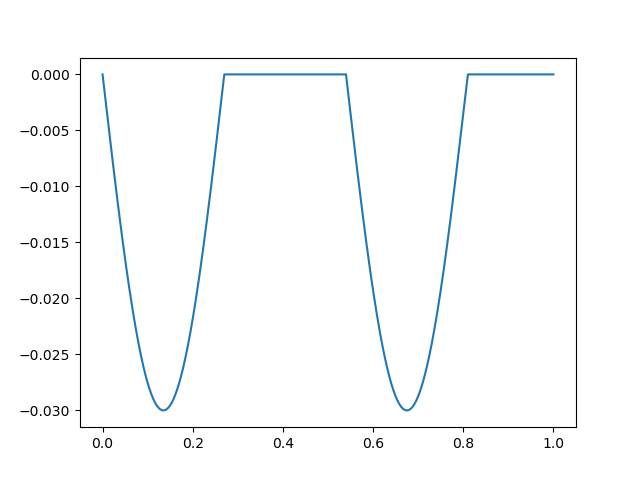
time_points = np.linspace(0, 1, 10000)
frequency = 5.556/3
amplitude = 0.03
sin_value=amplitude*np.sin(2 * np.pi * frequency * time_points)
aux = -np.maximum(sin_value, 0)
plt.plot(time_points, aux)
plt.show()
solver = VerticalHalfCar(mycar, from_data, time_points)
solution = solver.solve()
Zs = solution[:,0]
Ztheta = solution[:,1]
Zu1 = solution[:,2]
Zu2 = solution[:,3]
Zs_dot = solution[:,4]
Ztheta_dot = solution[:,5]
Zu1_dot= solution[:,6]
Zu2_dot= solution[:,7]
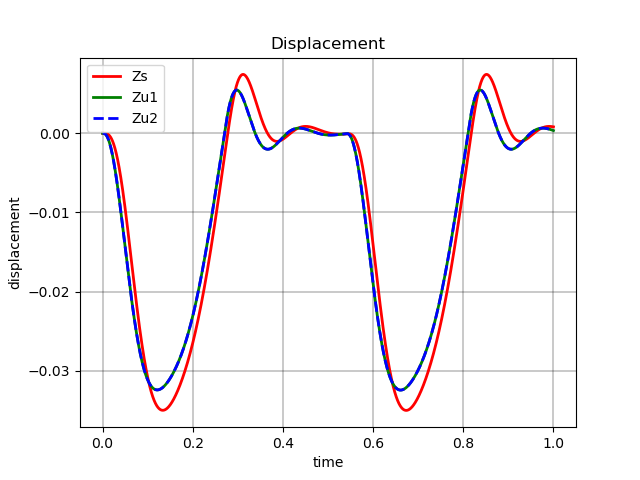
fig, ax_q = plt.subplots()
ax_q.plot(time_points, Zs, 'r-', linewidth=2.0, label="Zs")
ax_q.plot(time_points, Zu1, 'g-', linewidth=2.0, label="Zu1")
ax_q.plot(time_points, Zu2, 'b--', linewidth=2.0, label="Zu2")
ax_q.grid(color='k', linestyle='-', linewidth=0.3)
ax_q.set_xlabel('time' )
ax_q.set_ylabel('displacement')
ax_q.set_title('Displacement')
ax_q.legend()
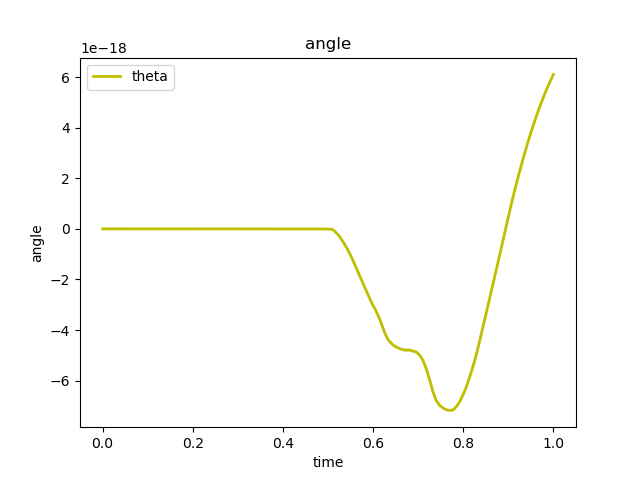
fig, ax_qa = plt.subplots()
ax_qa.plot(time_points, Ztheta, 'y-', linewidth=2.0, label="theta")
ax_qa.set_xlabel('time' )
ax_qa.set_ylabel('angle')
ax_qa.set_title('angle')
ax_qa.legend()
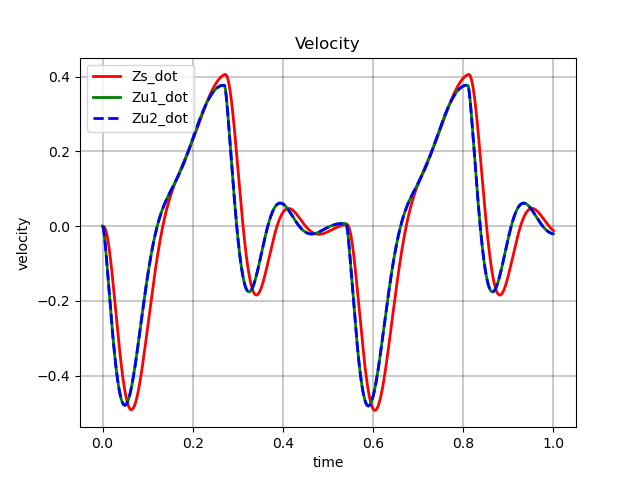
fig, ax_q_dot = plt.subplots()
ax_q_dot.plot(time_points, Zs_dot, 'r-', linewidth=2.0, label="Zs_dot")
ax_q_dot.plot(time_points, Zu1_dot, 'g-', linewidth=2.0, label="Zu1_dot")
ax_q_dot.plot(time_points, Zu2_dot, 'b--', linewidth=2.0, label="Zu2_dot")
#ax_q_dot.plot(time_points[:-1], np.diff(Zs)/np.diff(time_points), 'k--', linewidth=2.0, label="Zu_dot")
ax_q_dot.grid(color='k', linestyle='-', linewidth=0.3)
ax_q_dot.set_xlabel('time' )
ax_q_dot.set_ylabel('velocity')
ax_q_dot.set_title('Velocity')
ax_q_dot.legend()
plt.show()
Total running time of the script: (0 minutes 4.175 seconds)