Note
Go to the end to download the full example code.
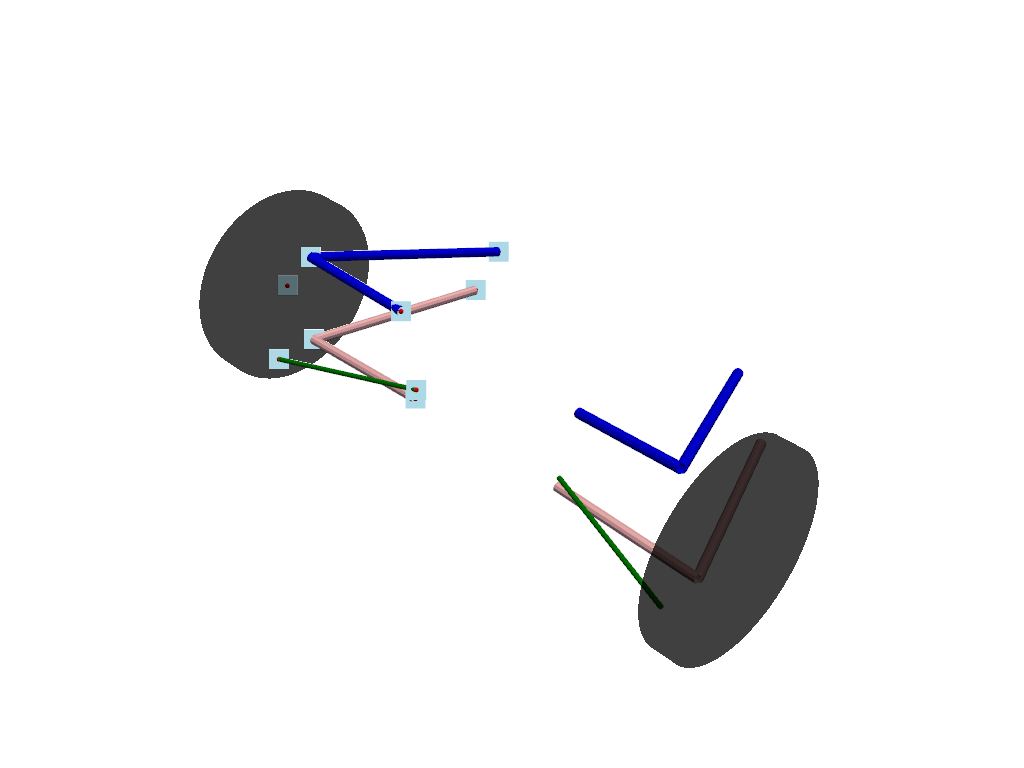
Double Whisbonebase: Base#
#
# \\\
# \-/
# UCA_REAR*
# /
# /
# ----------- /
# | | /
# | | *----------*UCA_FRONT
# | | uca_outer /⁻\.
# | | ///
# | |
# | |
# | | tierod_outer
# | | *--------------------*TIEROD_INNER
# | |
# | |
# | | lca_outer
# | | *------------*LCA_REAR
# ----------- \ /⁻\.
# \ ///
# \.
# *LCA_FRONT
# /⁻\.
# ///
Name |
Description |
|---|---|
UCA_FRONT |
upper control arm front |
UCA_REAR |
upper control arm rear |
LCA_FRONT |
upper control arm front |
LCA_REAR |
LOWER control arm rear |
TIEROD_INNER |
tierod inner |
uca_outer |
upper control arm outer |
lca_outer |
lower upper control arm outer |
tierod_outer |
tierod outer |
Import necessary libraries#
import numpy as np
import pandas as pd
import pyvista as pv
Import from pymycar package#
from pymycar.Cad.Suspension.double_whisbone import whisbone_cad_base
Parameters Definition#
data = {
"UCA_FRONT": np.array([586.7, -314.5, 199.9]),
"UCA_REAR": np.array([930.7, -230.2, 244.2]),
"LCA_FRONT": np.array([588.7, -384.2, 76.8]),
"LCA_REAR": np.array([938.2, -191.2, 62.7]),
"TIEROD_INNER": np.array([934.2, -192.1, 81.2]),
"uca_outer": np.array([953.0, -474.2, 272.2]),
"lca_outer": np.array([934.8, -514.7, 47.9]),
"tierod_outer": np.array([1027.1, -513.7, 43.6]),
"wheel_center": np.array([941.5, -580.2, 155.1])
}
upper_control_arm, lower_control_arm, direction, wheel_center1 = whisbone_cad_base(data, None)
wheel = pv.Cylinder(center=data["wheel_center"], direction=(0, 1, 0), height=50, radius=200)
Parameters Definition#
data2 = {
"UCA_FRONT": np.array([586.7, 314.5, 199.9]),
"UCA_REAR": np.array([930.7, 230.2, 244.2]),
"LCA_FRONT": np.array([588.7, 384.2, 76.8]),
"LCA_REAR": np.array([938.2, 191.2, 62.7]),
"TIEROD_INNER": np.array([934.2, 192.1, 81.2]),
"uca_outer": np.array([953.0, 474.2, 272.2]),
"lca_outer": np.array([934.8, 514.7, 47.9]),
"tierod_outer": np.array([1027.1, 513.7, 43.6]),
"wheel_center": np.array([941.5, 580.2, 155.1])
}
upper_control_arm2, lower_control_arm2, direction2, wheel_center12 = whisbone_cad_base(data2, None)
wheel2 = pv.Cylinder(center=data2["wheel_center"], direction=(0, 1, 0), height=50, radius=200)
plotter = pv.Plotter()
plotter.add_mesh(upper_control_arm, color="blue"),
plotter.add_mesh(lower_control_arm, color="pink"),
plotter.add_mesh(direction, color="green"),
plotter.add_mesh(wheel, color="black", opacity=0.5)
plotter.add_mesh(upper_control_arm2, color="blue"),
plotter.add_mesh(lower_control_arm2, color="pink"),
plotter.add_mesh(direction2, color="green"),
plotter.add_mesh(wheel2, color="black", opacity=0.5)
# Add points to the plot
for name, coord in data.items():
plotter.add_mesh(pv.Sphere(radius=5, center=coord), color='red')
# Add text annotations
for name, coord in data.items():
plotter.add_point_labels([coord], [name], point_size=20, font_size=30, text_color='black', always_visible=False)
plotter.show()
Total running time of the script: (0 minutes 0.287 seconds)