Note
Go to the end to download the full example code.
Double Whisbone#
#
# \\\
# \-/
# UCA_REAR*
# /
# /
# ----------- /
# | | /
# | | *----------*UCA_FRONT
# | | /⁻\
# | | ///
# | |
# | |
# | | tierod_outer
# | | *--------------------*TIEROD_INNER
# | |
# | |
# | | lca_outer
# | | *------------*LCA_REAR
# ----------- \ /⁻\
# \ ///
# \
# *LCA_FRONT
# /⁻\
# ///
Name |
Description |
|---|---|
UCA_FRONT |
upper control arm front |
UCA_REAR |
upper control arm rear |
LCA_FRONT |
upper control arm front |
LCA_REAR |
LOWER control arm rear |
TIEROD_INNER |
tierod inner |
uca_outer |
upper control arm outer |
lca_outer |
lower upper control arm outer |
tierod_outer |
tierod outer |
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import pyvista as pv
from pymycar.SuspensionKinematic.double_whisbone import double_whisbone_configuration_1
from pymycar.Cad.Suspension.double_whisbone import whisbone_cad_configuration_1
from pymycar.Cad.Wheel.wheel import wheel_cad
# Points
data = {
"UCA_FRONT": np.array([586.7, -314.5, 199.9]),
"UCA_REAR": np.array([930.7, -230.2, 244.2]),
"LCA_FRONT": np.array([588.7, -384.2, 76.8]),
"LCA_REAR": np.array([938.2, -191.2, 62.7]),
"TIEROD_INNER": np.array([934.2, -192.1, 81.2]),
"uca_outer": np.array([953.0, -474.2, 272.2]),
"lca_outer": np.array([934.8, -514.7, 47.9]),
"tierod_outer": np.array([1027.1, -513.7, 43.6]),
"wheel_center": np.array([941.5, -580.2, 155.1]),
"U_SPRING_MOUNT": np.array([831.7, -278.7, 251.2]),
"l_spring_mount": np.array([849.2, -419.1, 76.4])
}
Call the Solver#
solution, wheel_variables = double_whisbone_configuration_1(data,
max_height_increase=50,
max_height_decrease=20,
height_step=1,
save_to_txt=True,
result_folder_name="double_whisbone_configuration_1",
path=None)
All specified files deleted successfully.
All specified folders and their contents deleted successfully.
All specified folders and their contents deleted successfully.
Plot: “wheel_track vs “wheel_jounce”#
fig, ax = plt.subplots()
ax.plot(wheel_variables["wheel_jounce"], wheel_variables["wheel_track"], 'k-', linewidth=2.0)
ax.grid(color='k', linestyle='-', linewidth=0.3)
ax.set_xlabel('wheel track')
ax.set_ylabel('caster angle')
ax.set_title('Wheel Jounce - Wheel Track')
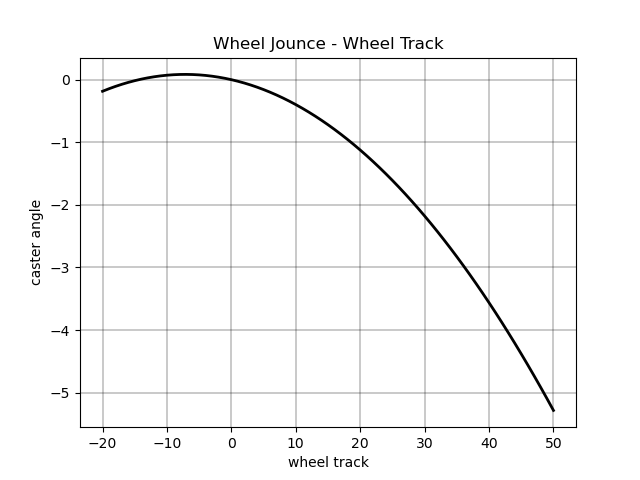
Text(0.5, 1.0, 'Wheel Jounce - Wheel Track')
Plot: “wheel_base” vs “wheel_jounce”#
fig, ax = plt.subplots()
ax.plot(wheel_variables["wheel_jounce"], wheel_variables["wheel_base"], 'k-', linewidth=2.0)
ax.grid(color='k', linestyle='-', linewidth=0.3)
ax.set_xlabel('wheel jounce')
ax.set_ylabel('wheel base')
ax.set_title('Wheel Jounce - Wheel Base')
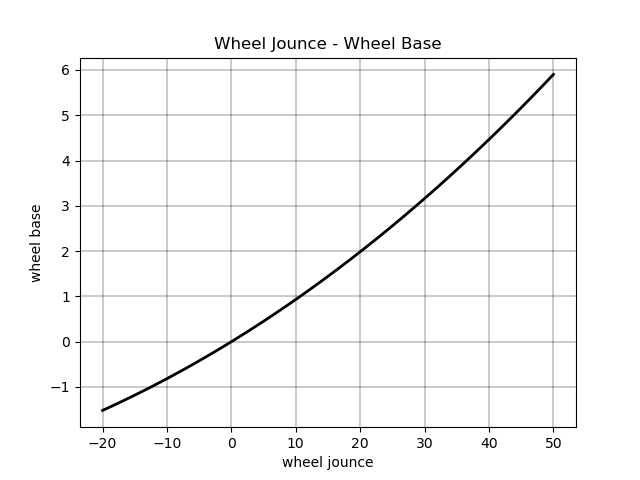
Text(0.5, 1.0, 'Wheel Jounce - Wheel Base')
Plot: “camber_angle” vs “wheel_jounce”#
fig, ax = plt.subplots()
ax.plot(wheel_variables["wheel_jounce"], wheel_variables["camber_angle"],'r-', linewidth=2.0)
ax.grid(color='k', linestyle='-', linewidth=0.3)
ax.set_xlabel('wheel jounce')
ax.set_ylabel('camber angle')
ax.set_title('Wheel Jounce - Camber Angle')
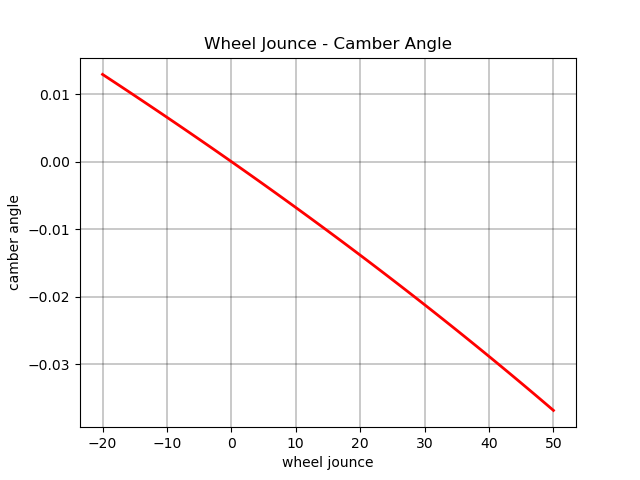
Text(0.5, 1.0, 'Wheel Jounce - Camber Angle')
Plot: “camber_angle” vs “wheel_jounce”#
fig, ax = plt.subplots()
ax.plot(wheel_variables["wheel_jounce"], wheel_variables["side_view_angle"],'r-', linewidth=2.0)
ax.grid(color='k', linestyle='-', linewidth=0.3)
ax.set_xlabel('wheel jounce')
ax.set_ylabel('side view angle')
ax.set_title('Wheel Jounce - Side View Angle')
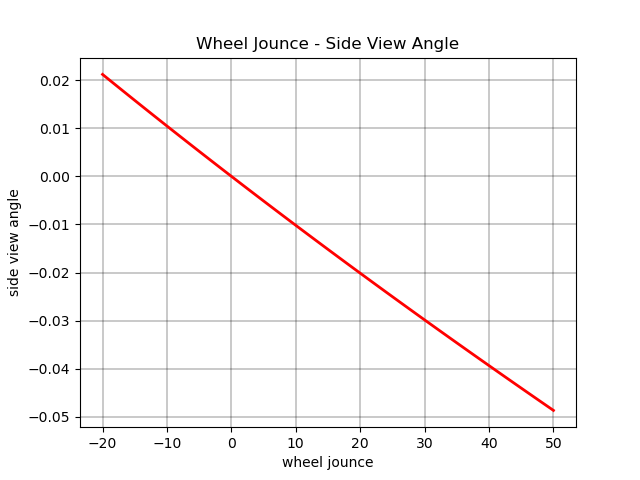
Text(0.5, 1.0, 'Wheel Jounce - Side View Angle')
Plot: “camber_angle” vs “wheel_jounce”#
fig, ax = plt.subplots()
ax.plot(wheel_variables["wheel_jounce"], wheel_variables["toe_angle"],'r-', linewidth=2.0)
ax.grid(color='k', linestyle='-', linewidth=0.3)
ax.set_xlabel('wheel jounce')
ax.set_ylabel('toe angle')
ax.set_title('Wheel Jounce - Toe Angle')
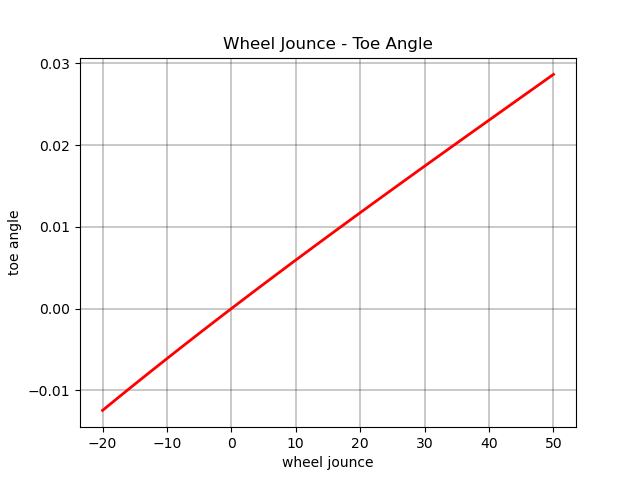
Text(0.5, 1.0, 'Wheel Jounce - Toe Angle')
Plot: “caster_angle” vs “wheel_jounce”#
fig, ax = plt.subplots()
ax.plot(wheel_variables["wheel_jounce"], wheel_variables["caster_angle"], 'g-', linewidth=2.0)
ax.grid(color='k', linestyle='-', linewidth=0.3)
ax.set_xlabel('wheel jounce')
ax.set_ylabel('caster angle')
ax.set_title('Wheel Jounce - Caster Angle')
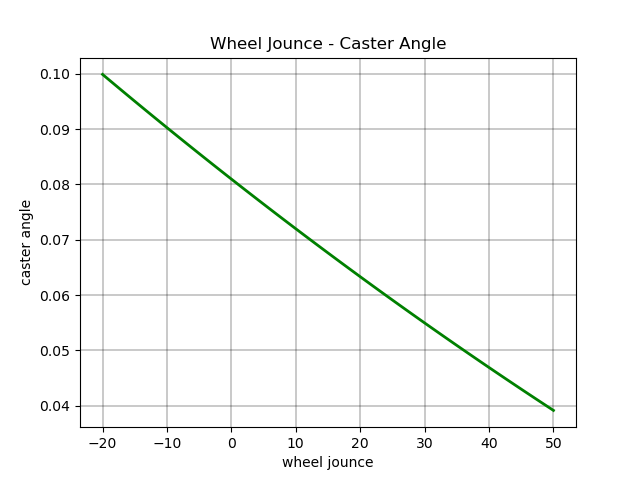
Text(0.5, 1.0, 'Wheel Jounce - Caster Angle')
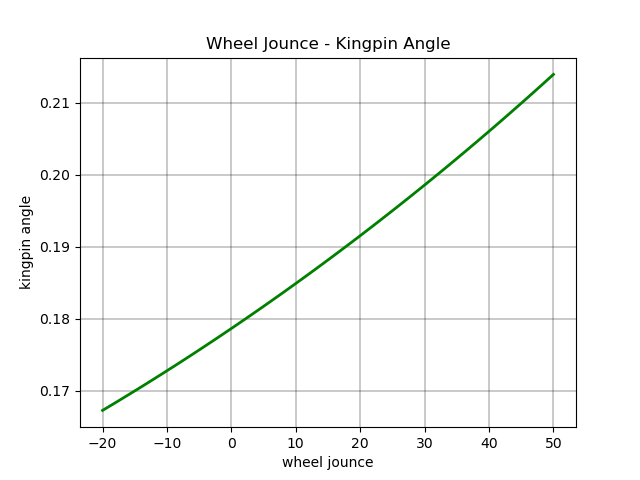
Plot: kingpin_angle vs “wheel_jounce”#
fig, ax = plt.subplots()
ax.plot( wheel_variables["wheel_jounce"], wheel_variables["kingpin_angle"], 'g-', linewidth=2.0)
ax.grid(color='k', linestyle='-', linewidth=0.3)
ax.set_xlabel('wheel jounce')
ax.set_ylabel('kingpin angle')
ax.set_title('Wheel Jounce - Kingpin Angle')
plt.show()
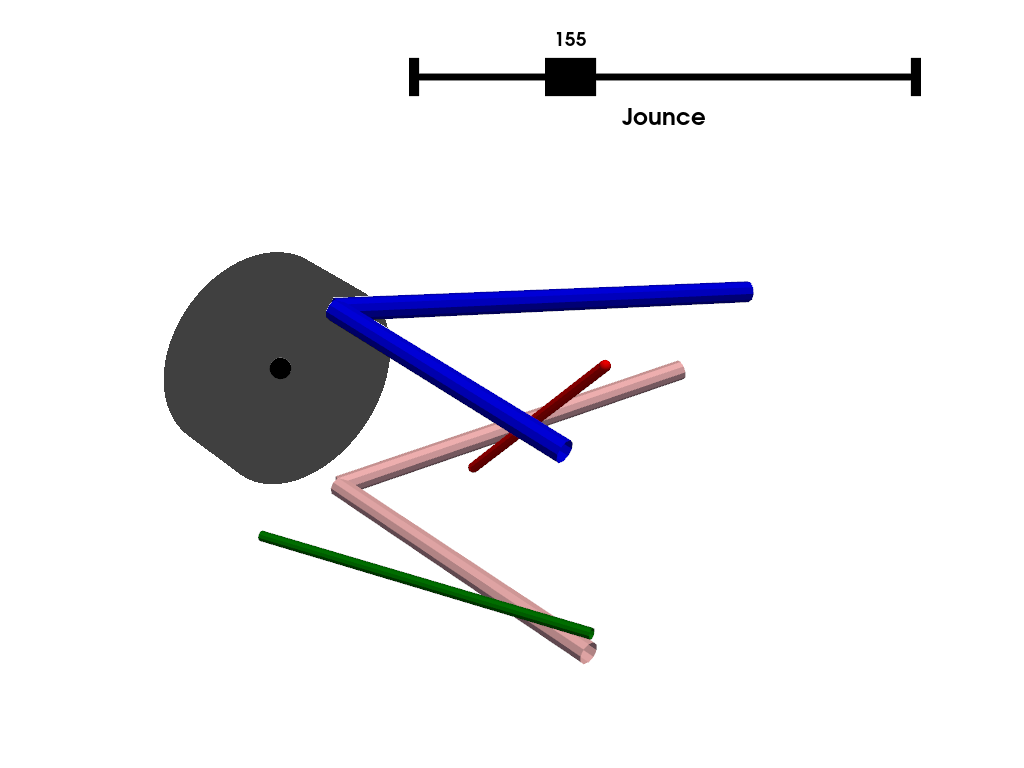
last_meshes = []
def plot_frame(plotter, data, index=None):
global last_meshes
if index is None:
index = data["index_reference"]
upper_control_arm, lower_control_arm, direction, wheel_center1, spring_o = whisbone_cad_configuration_1(data,index)
wheel = wheel_cad(data, wheel_variables, index)
# Remove the last meshes
for mesh in last_meshes:
plotter.remove_actor(mesh)
# Add new meshes
last_meshes = [
plotter.add_mesh(wheel_center1, color="black"),
plotter.add_mesh(upper_control_arm, color="blue"),
plotter.add_mesh(lower_control_arm, color="pink"),
plotter.add_mesh(direction, color="green"),
plotter.add_mesh(wheel, color="black", opacity=0.5),
plotter.add_mesh(spring_o, color="red")
]
plotter = pv.Plotter()
def create_mesh(value):
res = np.abs(solution["wheel_center"][:,2] - value).argmin()
plot_frame(plotter, solution, index=res)
plotter.add_slider_widget(create_mesh,
rng=[solution["wheel_center"][0, 2], solution["wheel_center"][-1, 2]],
value=solution["wheel_center"][solution["index_reference"]][2],
title='Jounce')
plotter.show()
Total running time of the script: (0 minutes 0.512 seconds)